1.5 Kangaroo 物理引擎
Created on 2024-08-31T13:22:52+08:00 @author: Richie Bao
Kangaroo 是 GH 内部的一个物理引擎(physics engine),如图 1.5-1,用于交互模拟、形式发现、优化和约束求解等。

图 1.5-1 Kangaroo2 组件
🍋🟩代码段-练习-1: ( )
建立一个平面格网,用MeshCorners提取格网角点,用Anchor组件固定这4个角点。通过控制点寻找到格网中的最近点,用组件Anchor控制该点(输入端 Point)到指定的目标点(输入端Target)。用组件Length(Line)调整线段的“弹性”,用Mesh Edges组件提取边,区分内外线段分别控制“弹性”大小。使用Solver组件解算。
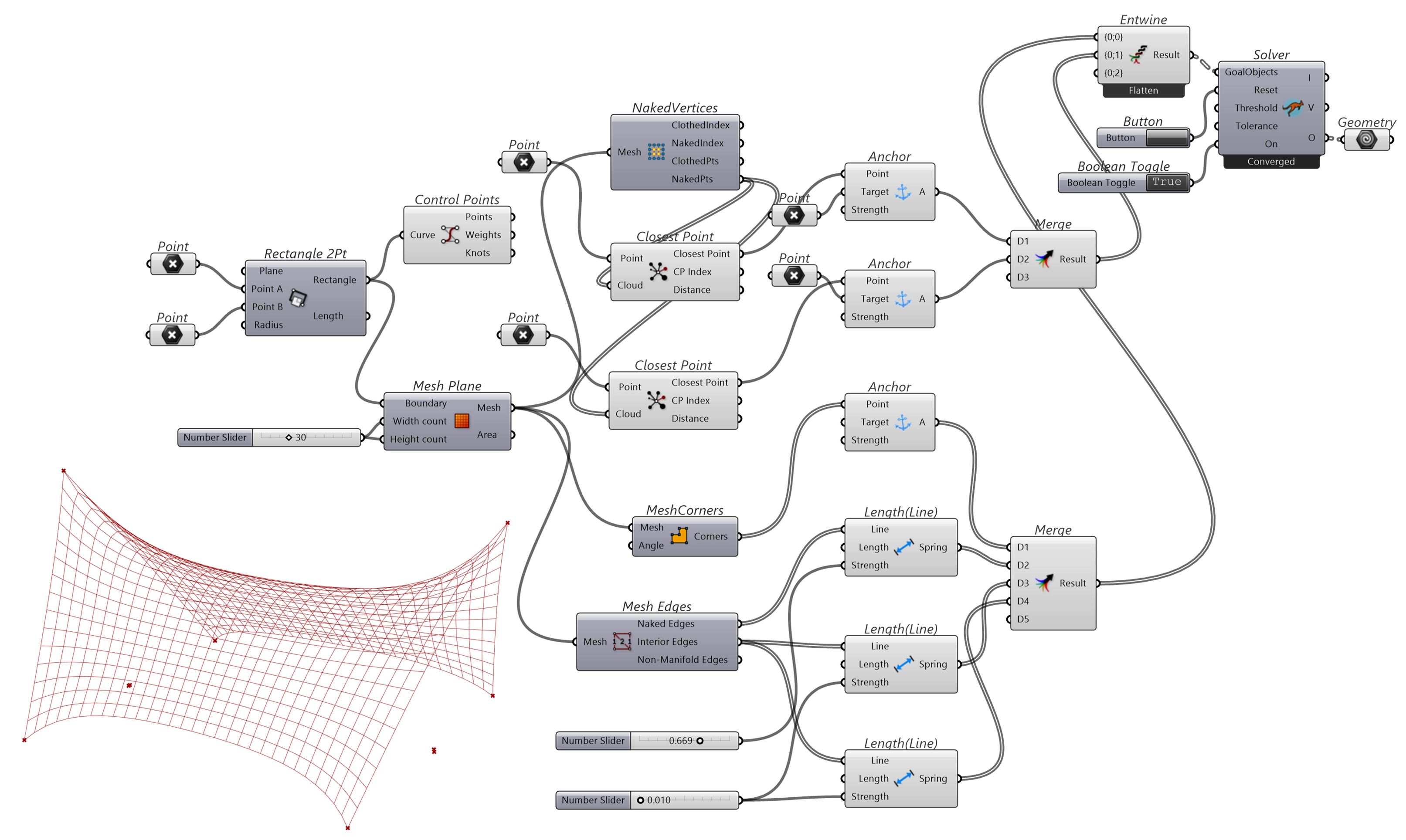
图 1.3.3-2 代码段(Kangaroo)-1与结果
⇩代码下载(codeSnippet_kangaroo_01.gh)
🍋🟩代码段-练习-2: ( )
首先用Populate Geometry和Populate 2D组件生成的少数几个随机点用Delaunay Mesh构建父类的格网,以便用Anchor固定这几个控制点束缚格网。进而用Weaverbird's Split Triangles Subdivision组件(需要按照 Weaverbird 扩展插件)细分格网(子类)。用Show显示解算后要查看的对象,该案例为细分后的格网。用EdgeLengths调整格网所有单元边线的“弹性”(松弛格网),其输入端的控制参数包括LengthFactor,为控制目标边为当前边的一个倍数,及强度值Strength。Pressure会对格网施加一个模拟的压力,即向格网单元面(三边面)法向(垂直于面)施加一个力,与当前三边面的面积成正比。SphereCollide组件可以避免格网顶点的交织膨胀,是通过控制顶点各个虚拟球体的碰撞实现。
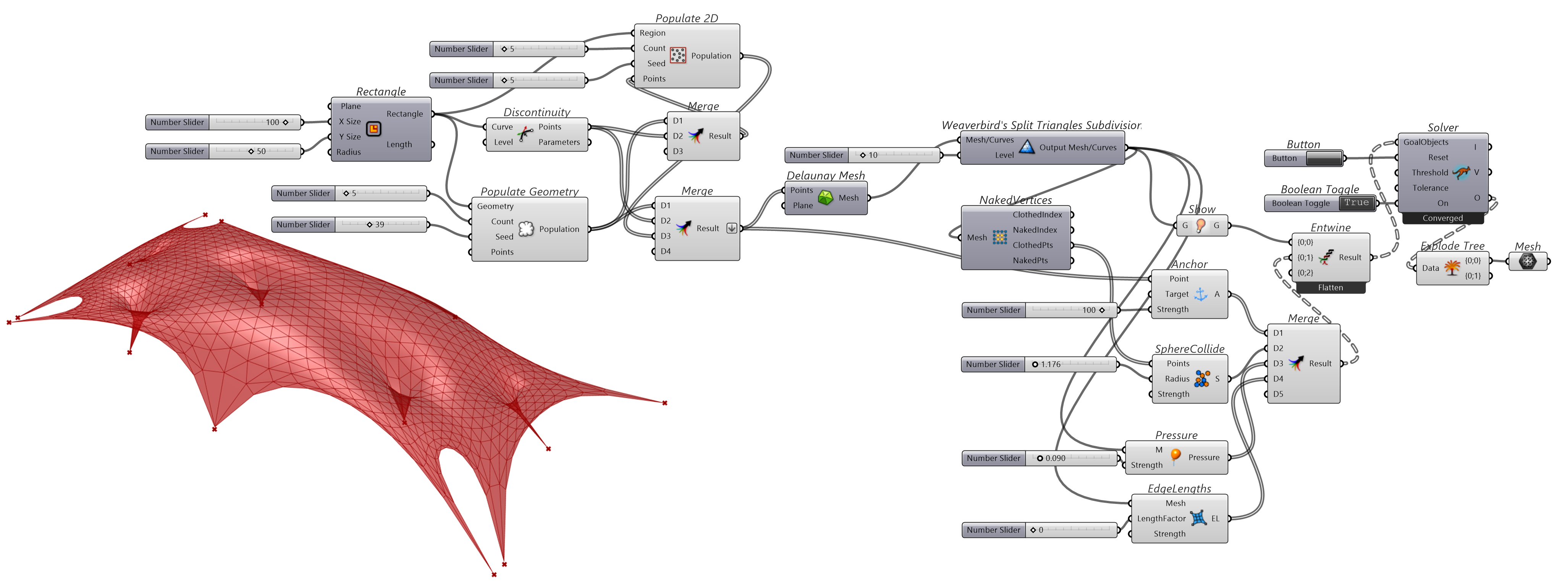
图 1.3.3-3 代码段(Kangaroo)-2与结果
⇩代码下载(codeSnippet_kangaroo_02.gh)
🍋🟩代码段-练习-3: ( )
如果格网单元为三边面,那么该面一定为平面,但是如果为四边面则不一定为平面。为了使得使用四边面构建的对象单元为一个平面,方便实际的加工建构,可以用Planarize组件使其趋于平面化。平民化过程中必然会变动当前格网顶点的位置,使用PlasticAnchor组件提供的方法在给定的约束距离内(Limit)偏移顶点。底部和拱形边缘的顶点需要用Anchor固定,以防发生位移。同时用ClampLength组件控制四边面边线长度变化的范围。用EqualLength组件尽量使四边面单元面的对角线长度相等,即尽量让单元面为规整的矩形。Smooth用于光滑格网。而Grab组件则可以在 Rhino 空间中拖动顶点(通常按住左键拖动),改变几何对象形态。
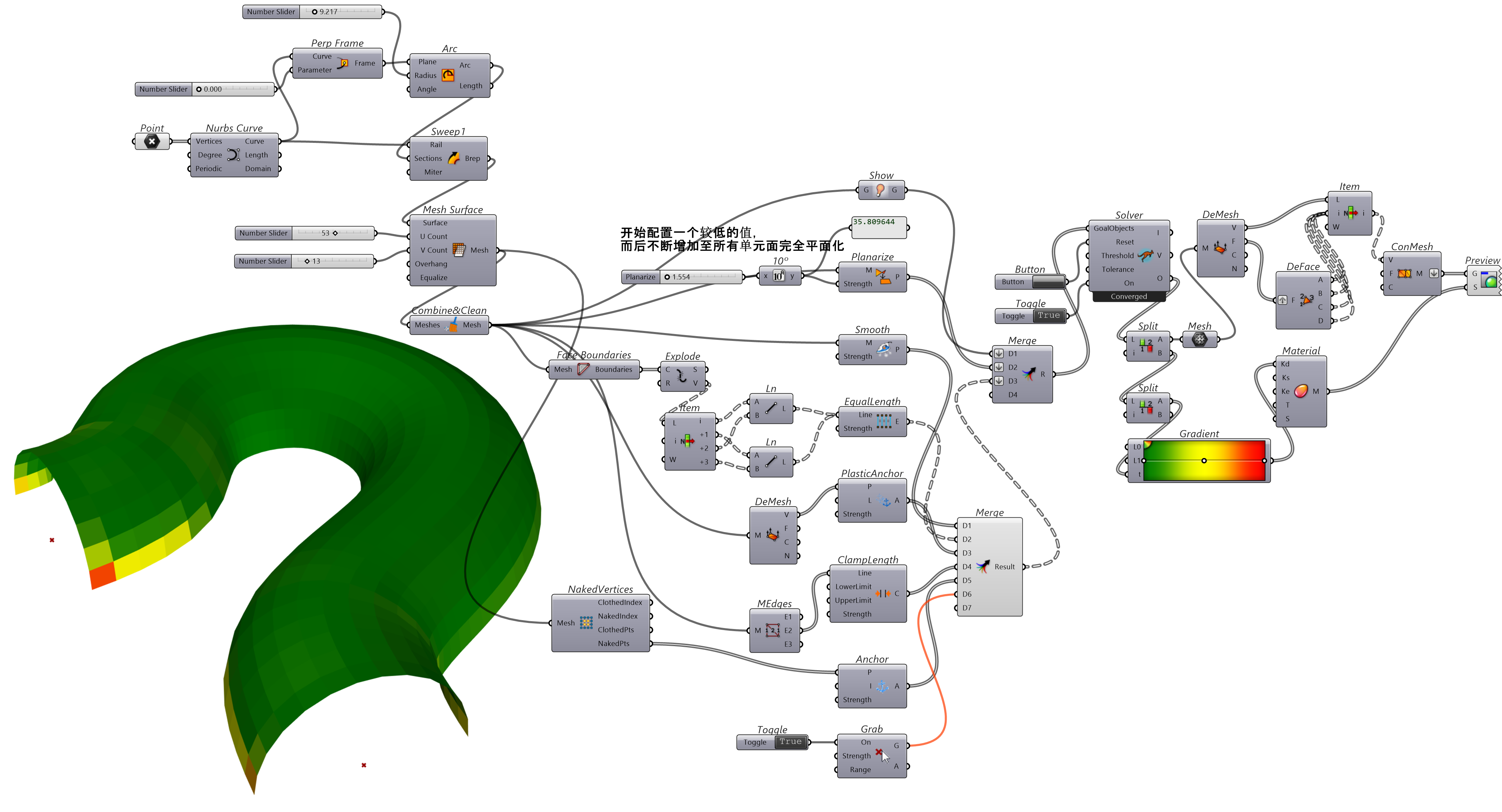
图 1.3.3-4 代码段(Kangaroo)-3与结果
⇩代码下载(codeSnippet_kangaroo_03.gh)
🍋🟩代码段-练习-4: ( )
用Anchor组件固定住立方体格网的8个顶点,用EdgeLengtsh松弛格网,用Show组件显示解算后的几何对象,可以构建一个类似弹性材料包裹体拉伸的效果。
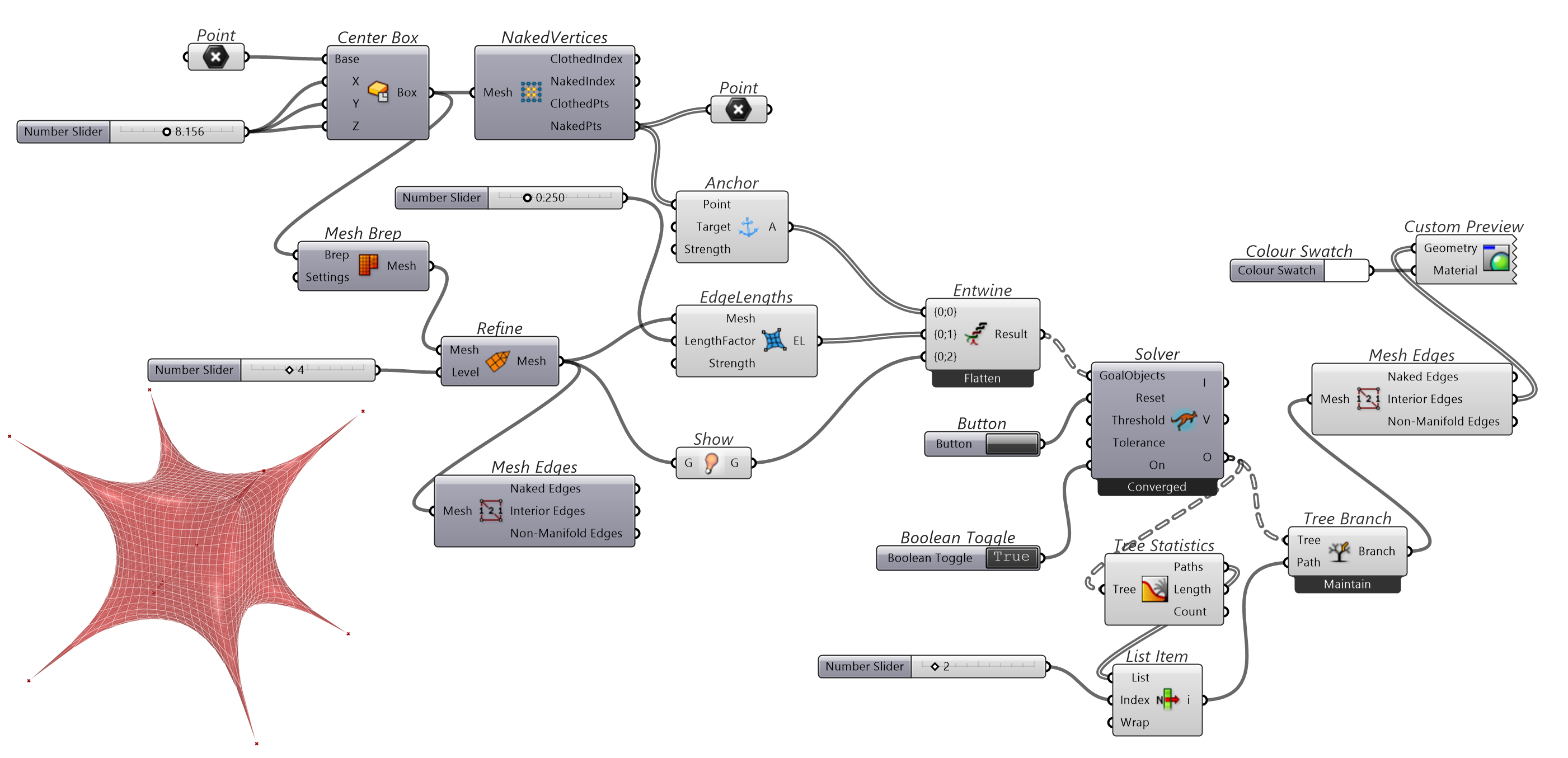
图 1.3.3-5 代码段(Kangaroo)-4与结果
⇩代码下载(codeSnippet_kangaroo_04.gh)
🍋🟩代码段-练习-5: ( )
处理格网时经常用到Weaverbird①扩展插件,其主要组件如下:
Weaverbird's Catmull-Clark Subdivision) |
计算由 Edwin Catmull 和 Jim Clark 首先在 1978 年描述的基于网格的递归细分类型。 生成的网格总是由四边面组成 |
Weaverbird's Constant Quads Split Subdivision) |
计算一个由四边面组成的新网格,是通过为原始网格任何一边添加一个面来获得 |
Weaverbird's Loop Subdivision) |
计算 Charles Loop 在 1987 年的数学论文中描述的基于网格的递归细分类型。生成的网格总是三边面组成 |
Weaverbird's Split Triangles Subdivisions) |
在每个面中置入几个三边面 |
Weaverbird's Sierpinski Triangles Subdivision) |
在网格的每个角上置入一个三边面。网格每面将至少存有一个孔洞 |
Weaverbird's Picture Frame) |
计算一个具有更高裸边数的新网格。其中每个面在中心有一个孔洞,类似于一个相框。生成的网格总是由四边面组成 |
Weaverbird's Sierpinski Carpet) |
计算一个具有更高裸边数的新网格。其中每个面在中心有一个孔洞。 生成的网格总是由四边面组成 ,并且可以用于计算 Sierpinski 斑纹 |
Weaverbird's Mesh Window) |
替换每个原始网格面为一个新的,并在内部重建。每个面与原来的面有相同数量的边 |
Weaverbird's Mesh Prism
Weaverbird's Mesh Antiprism
Weaverbird's Mesh Pyramid
Weaverbird's Mesh Dipyramid |
基本网格定义 |
用 Weaverbird 的Weaverbird's Mesh Mesh Icosahedron组件定义一个基本格网,并用Weaverbird's Loop Subdivision递归细分格网。用Volumne组件调整格网的体积变化,用Smooth平滑格网,用SphereCollide(SC)控制格网顶点之间的距离,并用Length(LIne)限制格网边的长度变化,会模拟球状格网“泄气”的形态变化。
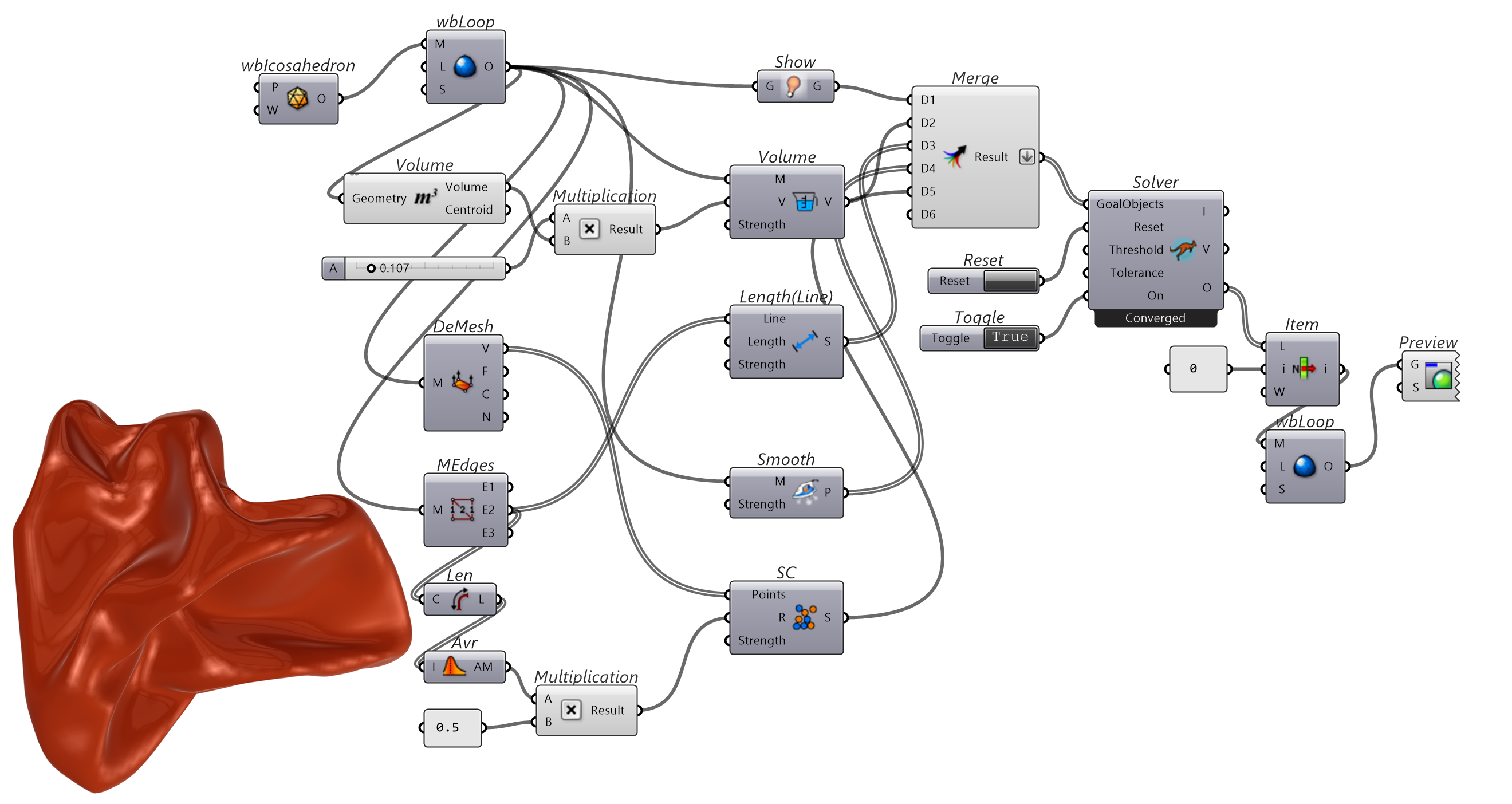
图 1.3.3-6 代码段(Kangaroo)-5与结果
⇩代码下载(codeSnippet_kangaroo_05.gh)
🍋🟩代码段-练习-6: ( )
变化用Voronoi 3D生成的三维泰森多边形,用Anchor固定角点,用removeDuplicateLines组件移除叠合重复的线段,用Length(Line)变化各个泰森多边形边的长度,其输入端Length参数为原线段长度的倍数。
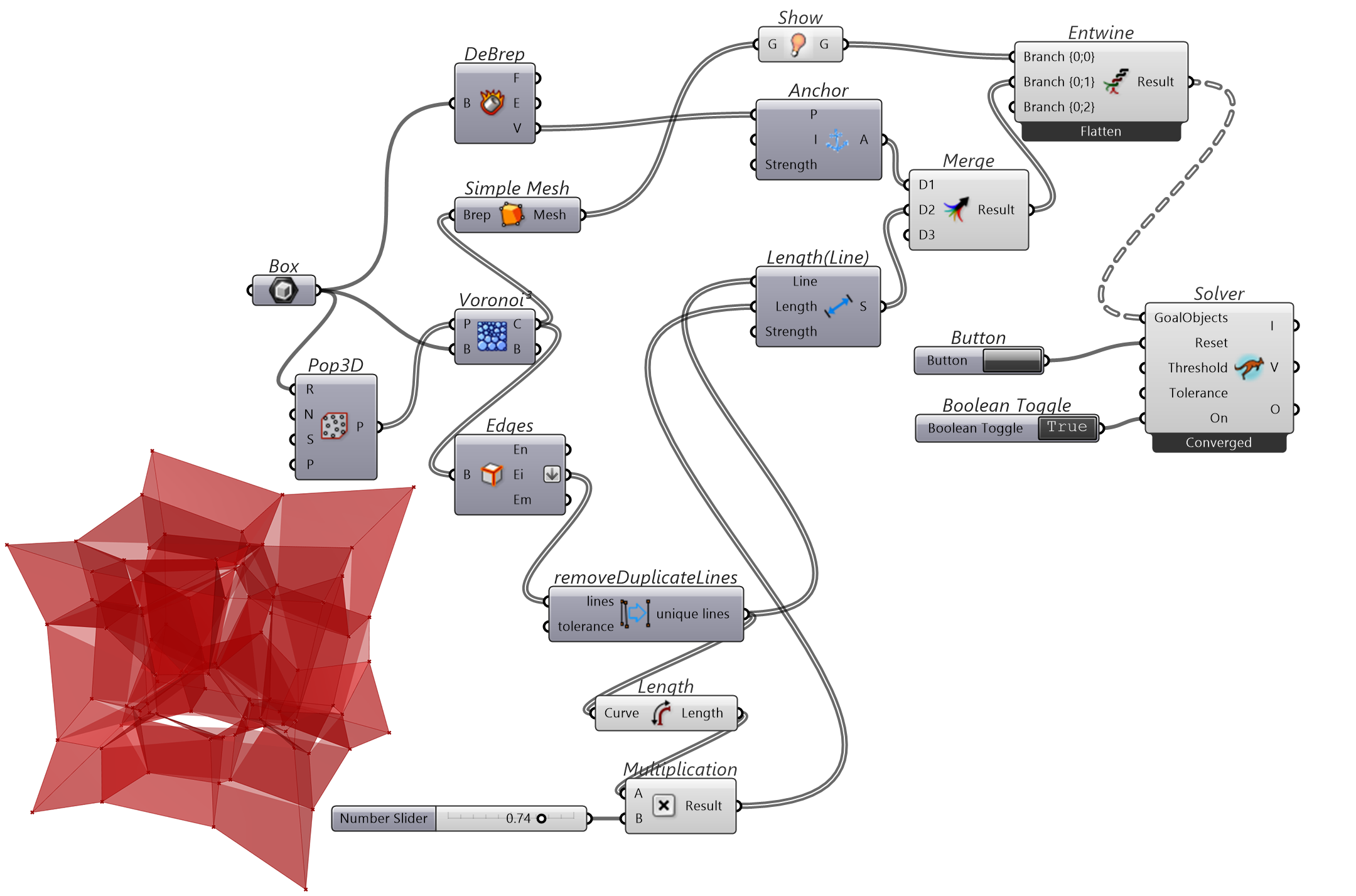
图 1.3.3-7 代码段(Kangaroo)-6与结果
⇩代码下载(codeSnippet_kangaroo_06.gh)
🍋🟩代码段-练习-7: ( )
该代码段与代码段-3类似,用EqualLength组件分别控制格网内部边线和“碗口”裸露边线等长的强度,对“碗口”边线两两邻接边线施加一个Angle组件的角度限制。因为要拖曳格网达到雕刻的目的,对顶点施加PlasticAnchor,以便顶点能够在给定的阈值内移动,并用ClampLength限制边长的变化区间,增加Grab组件使得可以在 Rhino3D 空间拖曳格网顶点变化形态。
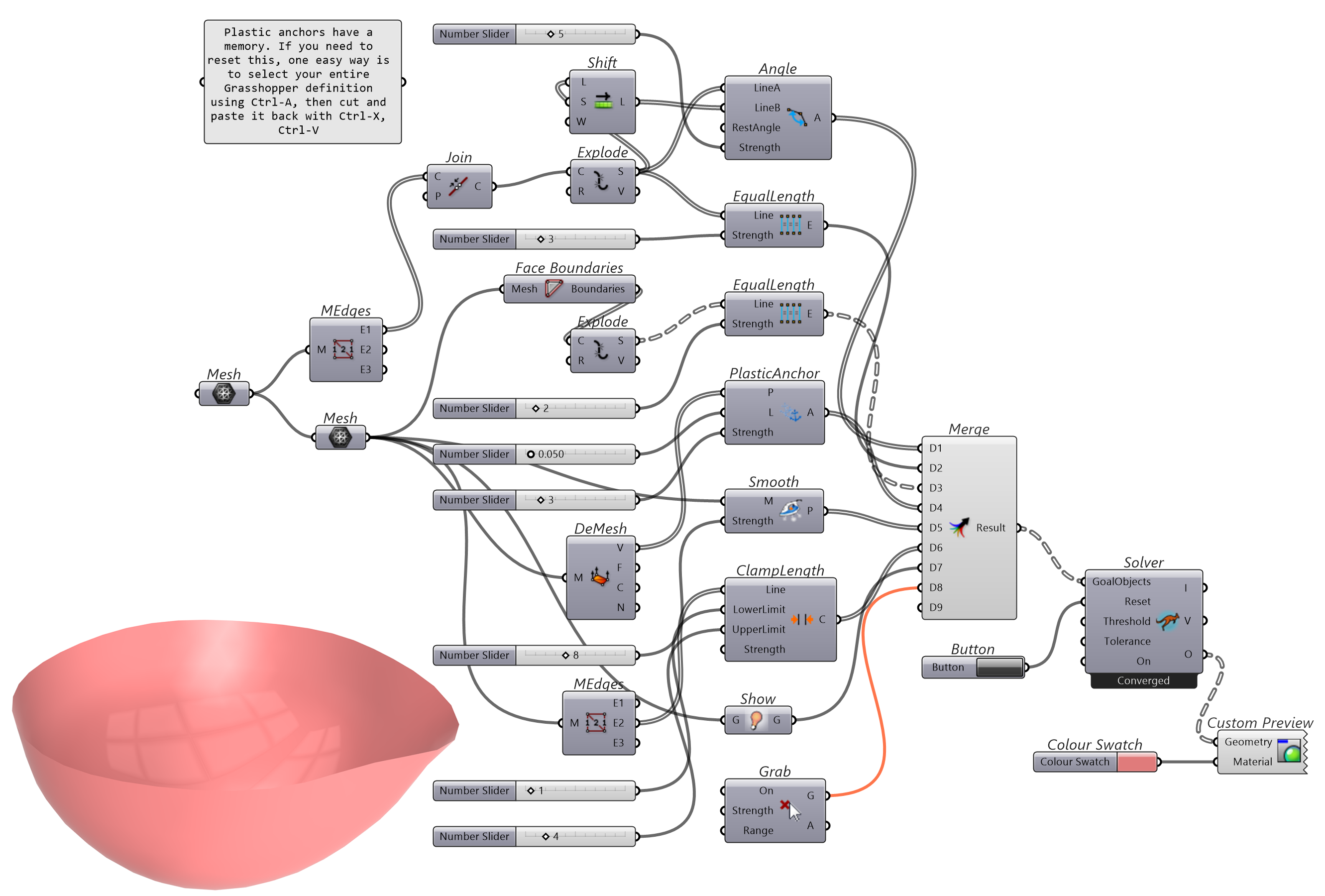
图 1.3.3-8 代码段(Kangaroo)-7与结果
⇩代码下载(codeSnippet_kangaroo_07.gh)
🍋🟩代码段-练习-8: ( )
这是物体碰撞模拟,核心组件是使用Floor作为地面,限制物体通过;用Collider模拟加粗线段和球体之间的碰撞,并用Length(Line)保持线段的长度,且用Load施加一个模拟的重力,让物体自由落体并发生碰撞。
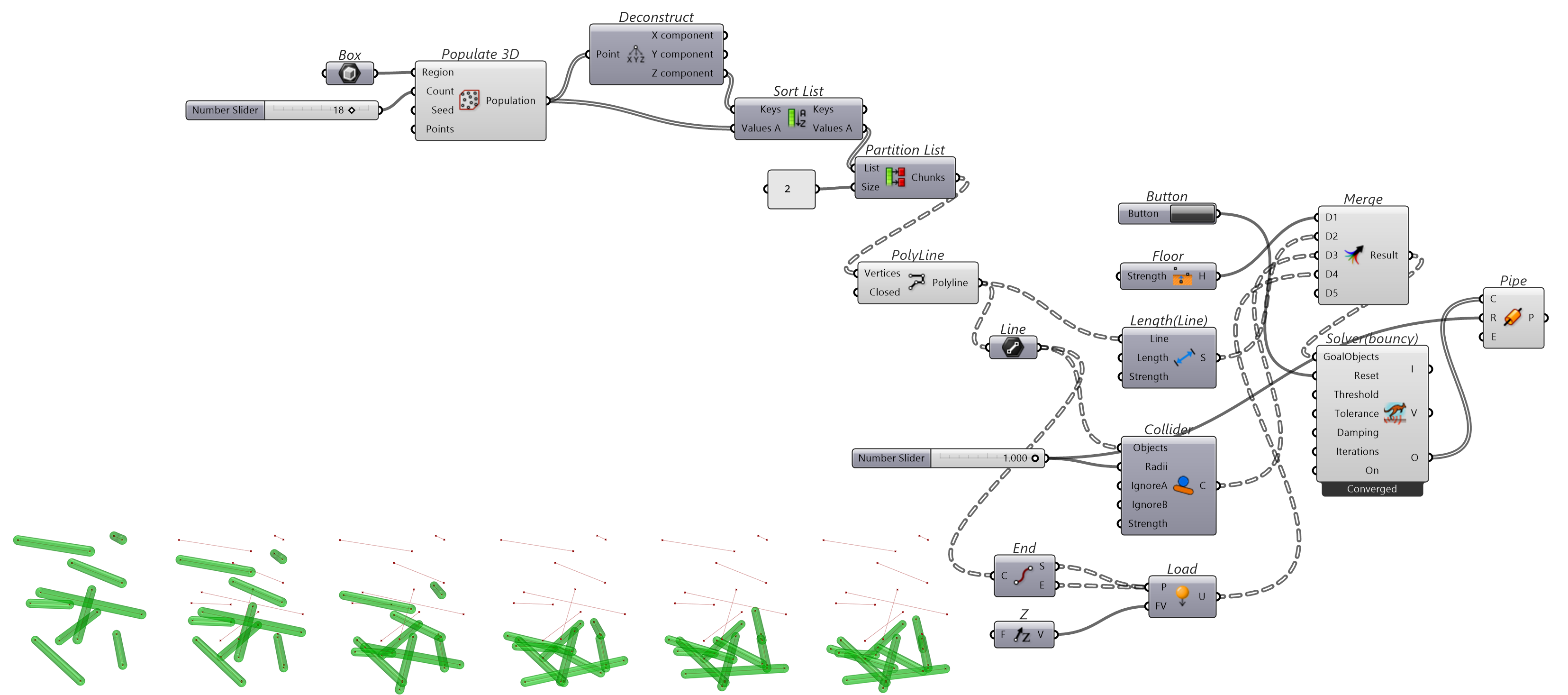
图 1.3.3-9 代码段(Kangaroo)-8与结果

⇩代码下载(codeSnippet_kangaroo_08.gh)
🍋🟩代码段-练习-9: ( )
SphereCollide和OnMesh组件配合,可以控制顶点在格网面上移动,并彼此之间保持给定参数Radius(r)半径的距离,从而达到基于解算后的顶点,新建几何对象(例如圆)贴附于格网表面并彼此间保持距离或相互贴合。
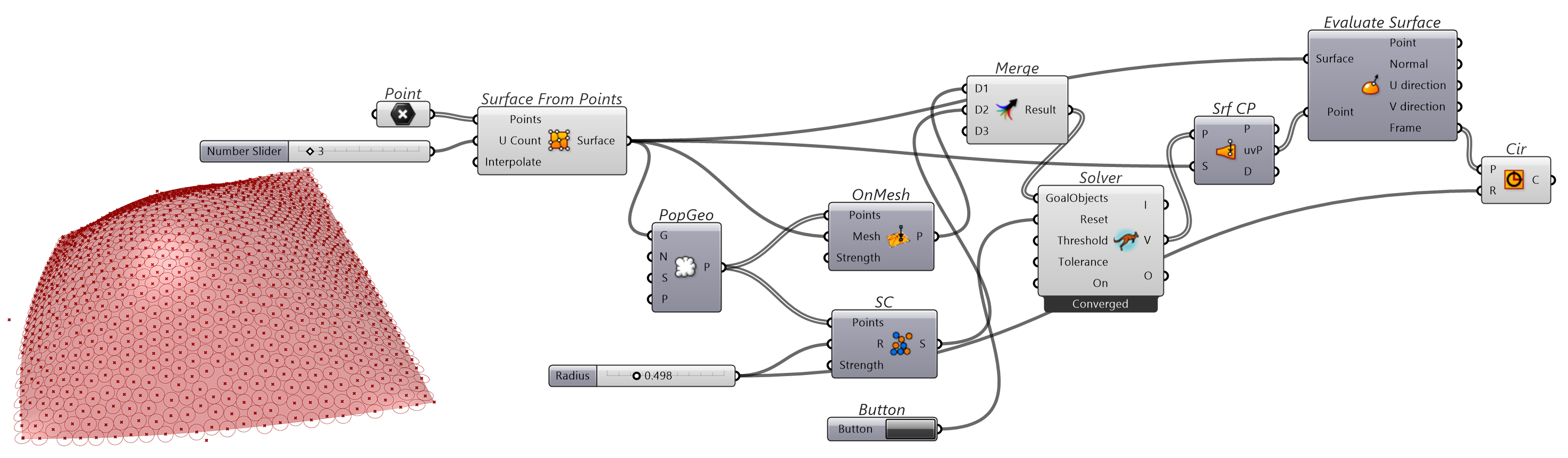
图 1.3.3-10 代码段(Kangaroo)-9与结果
⇩代码下载(codeSnippet_kangaroo_09.gh)
🍋🟩代码段-练习-10: ( )
SolidPointCollide组件可以控制输入端Points对象是否被挡于Solid对象之外,能够用于模拟点(粒子)对象碰撞的行为。用Floor模拟地面行为,用SphereCollide组件控制粒子间的距离。
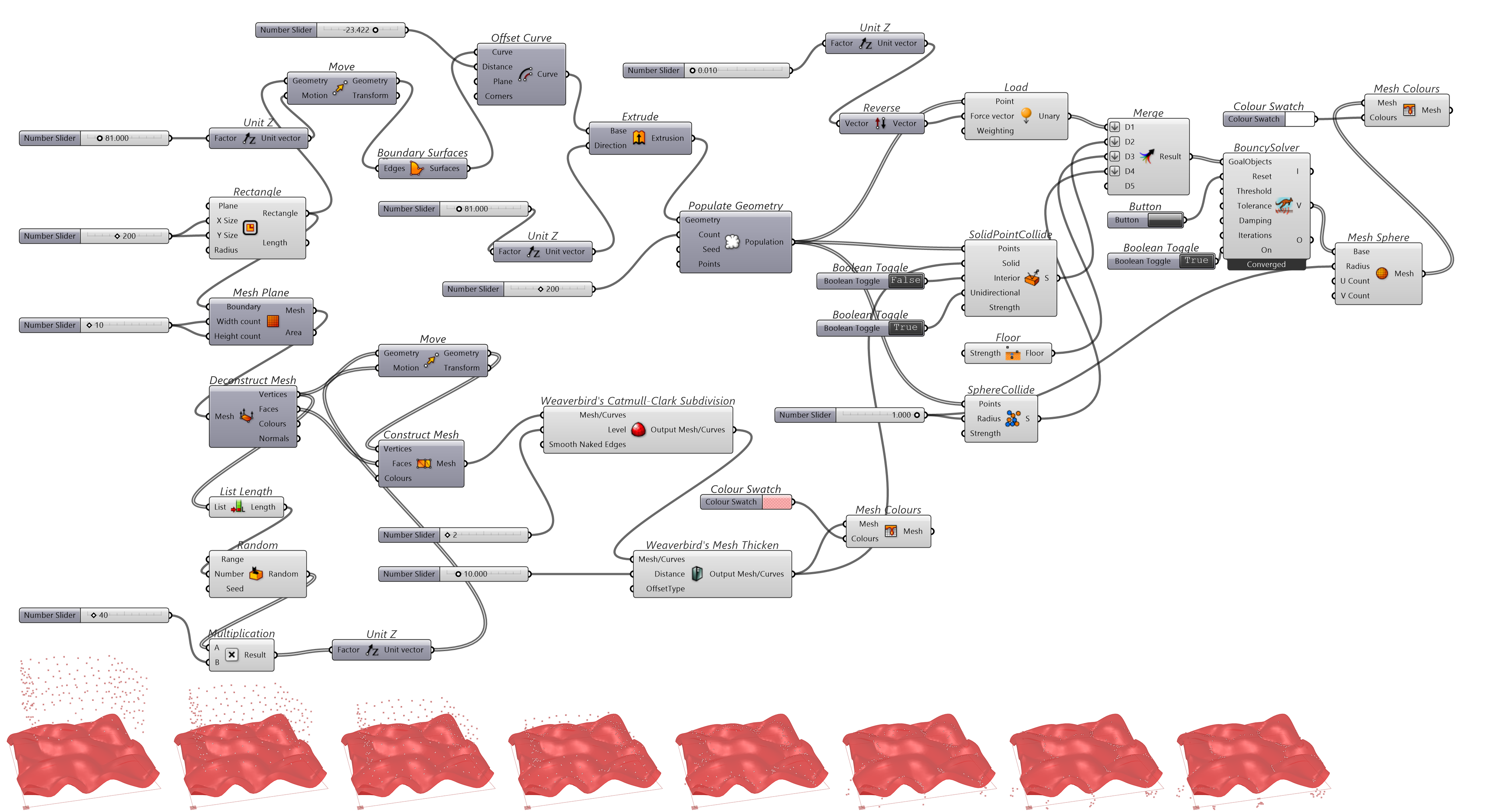
图 1.3.3-11 代码段(Kangaroo)-10与结果

⇩代码下载(codeSnippet_kangaroo_10.gh)
🍋🟩代码段-练习-11: ( )
将一个圆切分成无数线段,用Lengh(Line)控制这些线段的长度,用SphereCollide控制点之间的距离,用PlasticAnchor约束原始的等分点,使得点(粒子)自由的向圆外扩散,拟合出多样的形态。
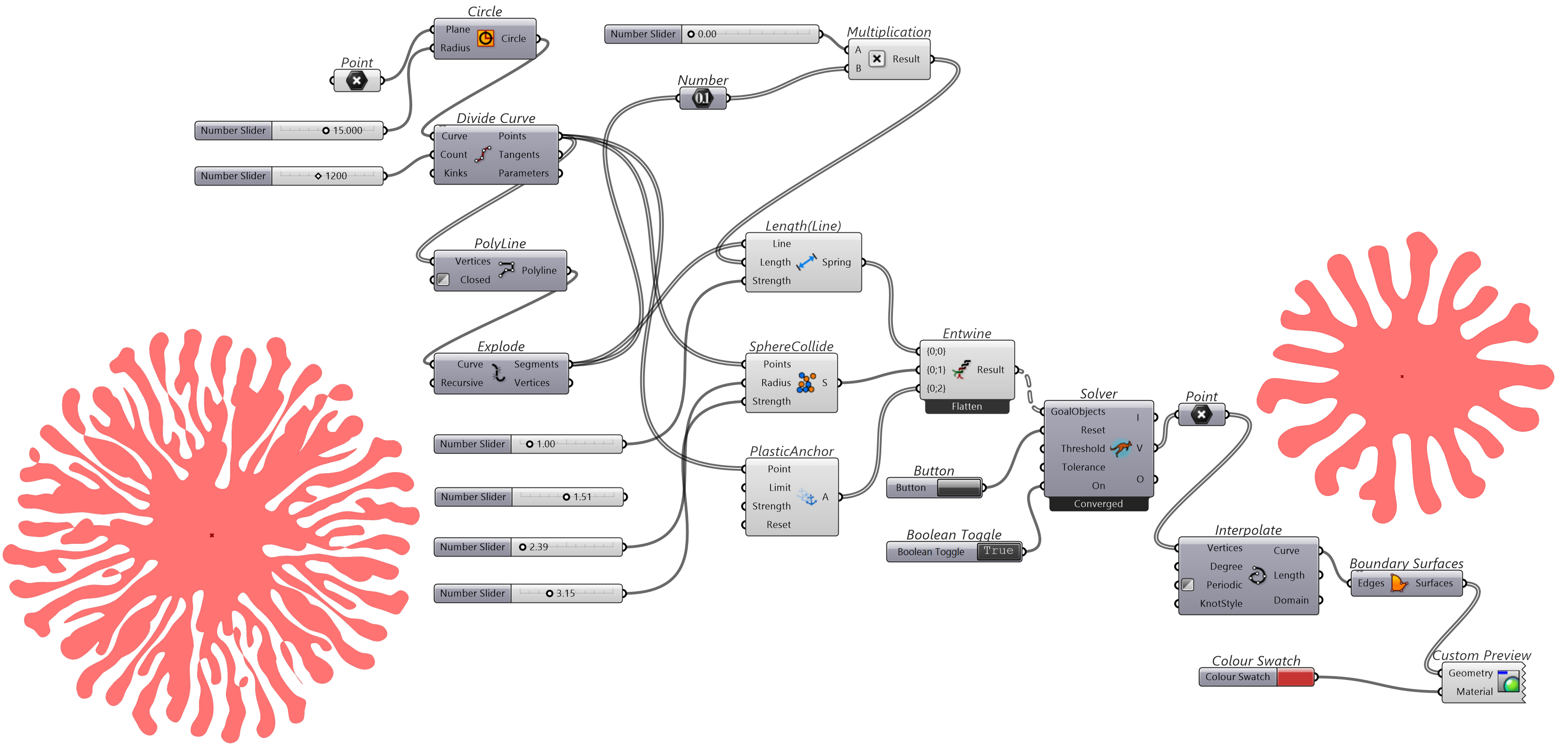
图 1.3.3-12 代码段(Kangaroo)-11与结果
⇩代码下载(codeSnippet_kangaroo_11.gh)
🍋🟩代码段-练习-12: ( )
基于一个平面格网,用Anchor固定住指定的少数几个格网顶点拴住变化的格网,用EdgeLengths松弛格网单元的边线,并控制沿边(裸露)的顶点在发生位置改变时用AnchorXYZ组件固定其 X 和 Y 值,保持水平位置不变而仅变化 Z 值,因此可以观察到沿边顶点为垂直位移。
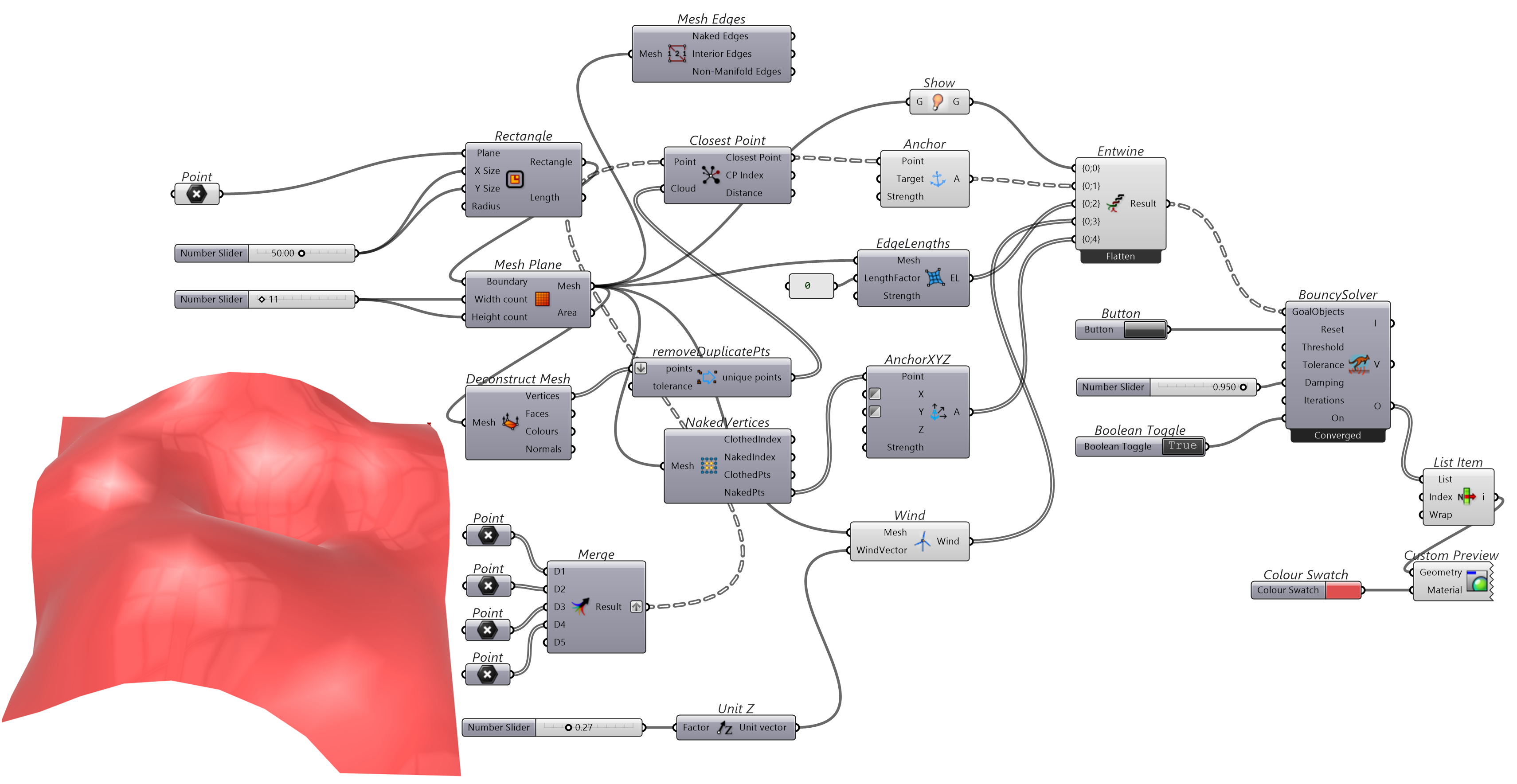
图 1.3.3-13 代码段(Kangaroo)-12与结果
⇩代码下载(codeSnippet_kangaroo_12.gh)
🍋🟩代码段-练习-13: ( )
与代码段-11 基本同,只是增加了OnMesh 将粒子的移动贴附于给定的球体表面。
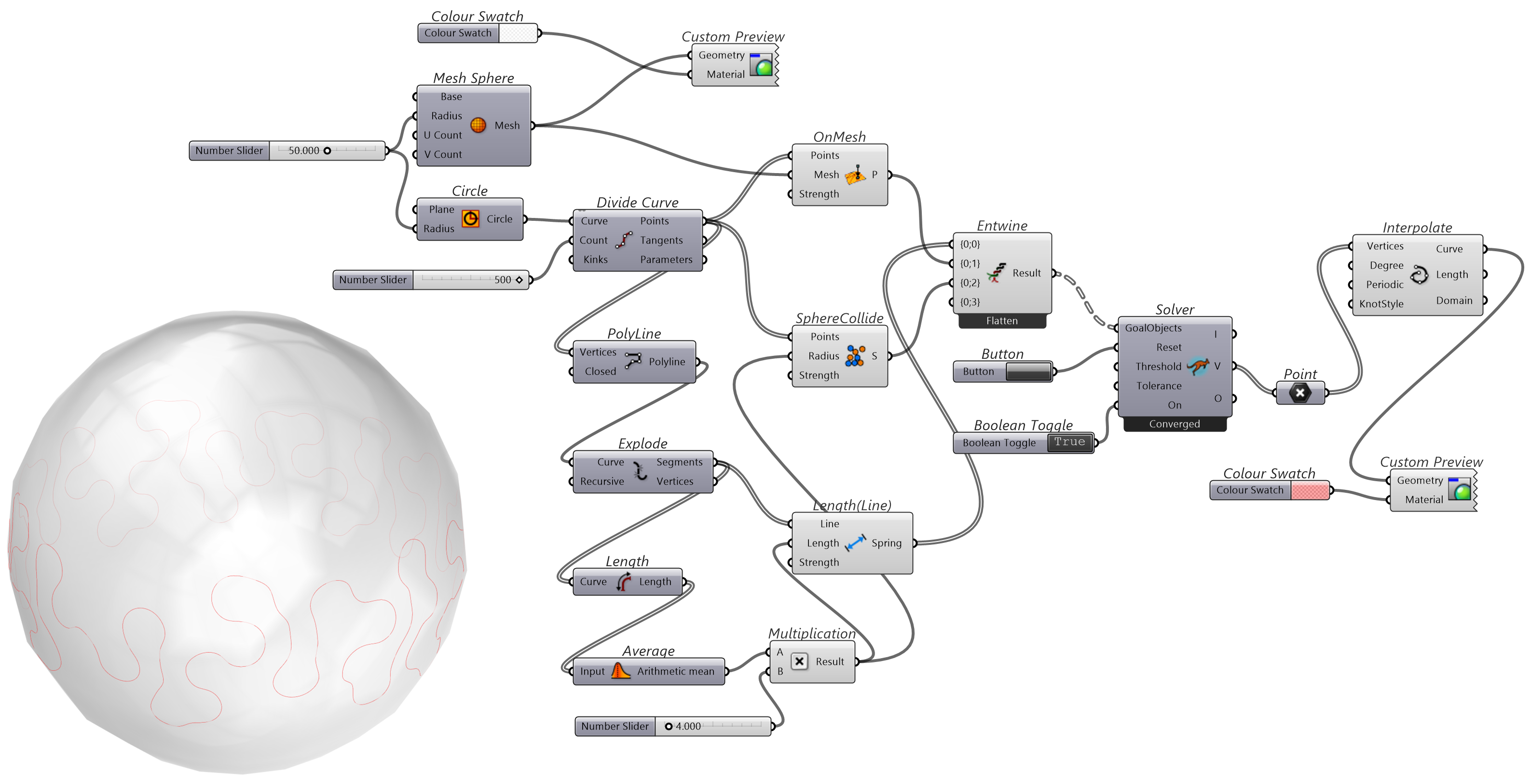
图 1.3.3-14 代码段(Kangaroo)-13与结果
⇩代码下载(codeSnippet_kangaroo_13.gh)
🍋🟩代码段-练习-14: ( )
基本思路与代码段-1,2,12 等相同,给定一个类似空间管状的格网,用Anchor固定裸露的边缘顶点到各自参考平面绘制的圆的最近点映射上,并用EdgeLength松弛格网边线。
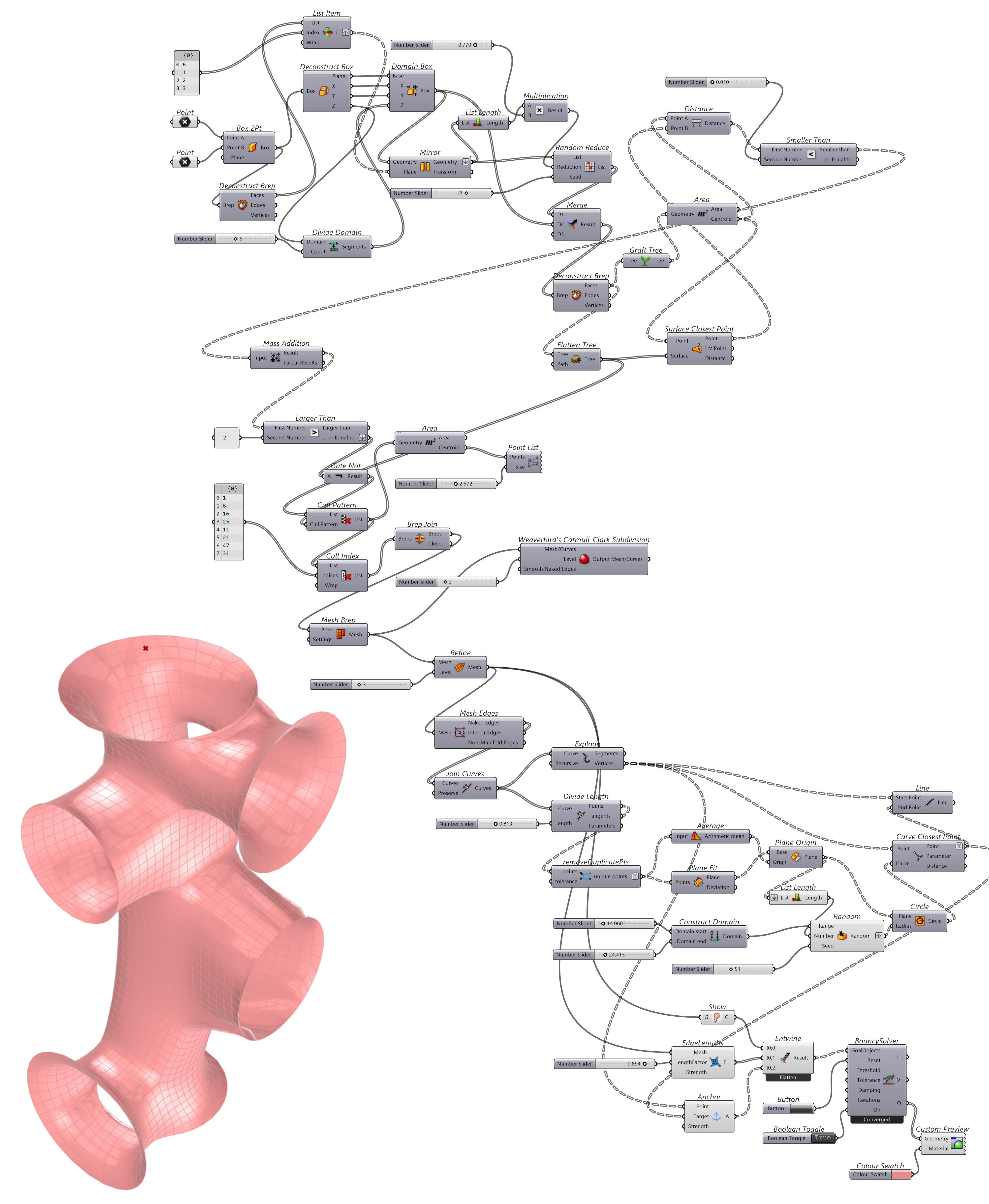
图 1.3.3-15 代码段(Kangaroo)-14与结果
⇩代码下载(codeSnippet_kangaroo_14.gh)
🍋🟩代码段-练习-15: ( )
该代码段为模拟折纸,用Length(Line)保持格网单元面的边长保持不变,即纸张不会发生变形;用Floor模拟地面,使得格网(纸张)似乎位于一个桌面上;用Hinge铰链沿“折痕”模拟合页的开合;并用Load施加力使得“纸张”沿“折痕”转动。
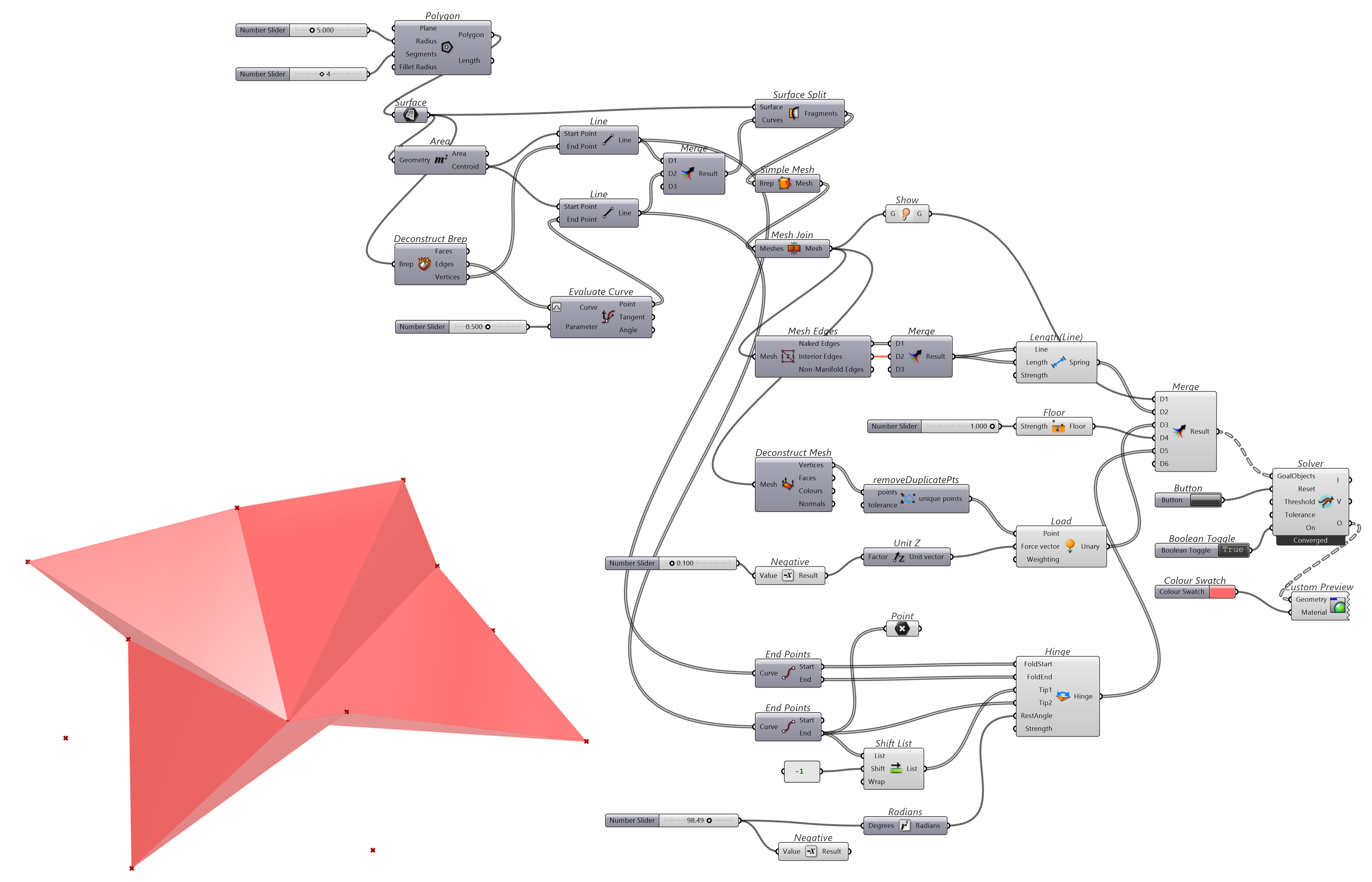
图 1.3.3-16 代码段(Kangaroo)-15与结果
⇩代码下载(codeSnippet_kangaroo_15.gh)
注释(Notes):
① Weaverbird,是一个拓扑建模器,包含许多已知的网格细分算法和变换操作符(https://www.giuliopiacentino.com/weaverbird/)。